Eigenvector
A nonzero vector, x, is an eigenvector of some linear transformation if the linear transformation produces a scalar multiple of x,

where T is a linear transformation, and λ is referred to as an eigenvalue of the corresponding eigenvector x. In the context of matrices, an eigenvector is therefore a vector that, when multiplied by some transformation matrix, results in the eigenvector multiplied by some scalar; multiplying the vector by a matrix or a scalar therefore produces the same result:

where A is an n × n matrix, x is a non-zero vector, and λ is the corresponding eigenvalue. Geometrically, an eigenvector is a vector pointing in a given direction that is stretched by a factor corresponding to its eigenvalue. Consider the following figure.
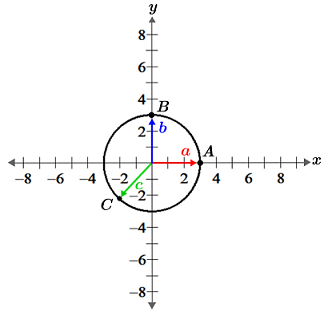
In the figure, A, B, and C are points on a circle whose positions are determined by vectors a, b, and c respectively. Given that a, b, and c are eigenvectors, a transformation that scales each vector by a factor of 2 will result in a circle with a radius that is double that of the original circle. The transformed vectors all point in the same direction as their original vectors; the only difference is that they are scaled by λ, the eigenvalue, which in this case is 2:
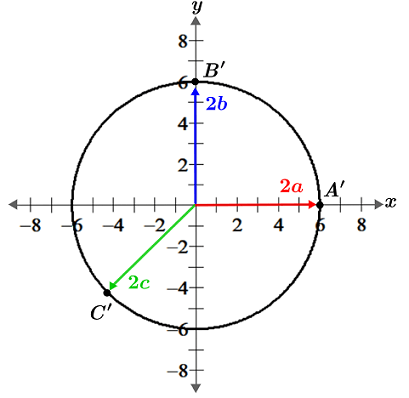
We can confirm this by computing the magnitudes of vectors c and 2c as an example, which can be represented in column vector form as follows:


Vector c has a magnitude of,

and 2c has a magnitude of:

The angle formed by vector c with the x-axis is,
 |
 |
 |
 |
|
 |
and the angle formed by 2c with the x-axis is:
|
 |
|
|
|
|
Thus, 2c is twice the magnitude of c, and both point in the same direction, confirming that 2 is the corresponding eigenvalue of eigenvector c. The same is true for each of the vectors shown in the figures above.
How to find an eigenvector
To find an eigenvector for a given square matrix, we need to first determine the eigenvalue, which we can do using the matrix definition of an eigenvector:
Set this equation equal to 0 (a zero matrix) such that:
 |
 |
 |
|
We can then multiply λ by the corresponding n × n identity matrix I, which doesn't change the value of λ while also allowing us to combine it with matrix A such that:

Since x is an eigenvector, we know that it must have a non-zero value, or the solution to the above expression would be trivial. In cases where the matrix, (λI - A), is invertible, eigenvector x would equal 0; we want to find solutions such that this is not the case. Recall that if the determinant of a matrix is equal to 0, that the matrix is not invertible. Thus, we take the determinant of the above expression and set it equal to 0 in order to solve for the eigenvector of the system:

The above expression, det(A - λI) is referred to as the characteristic polynomial of A, and the entire equation is referred to as the characteristic equation. The eigenvalues of A can therefore also be referred to as characteristic values of A, where the eigenvalues of A are the roots of the characteristic polynomial such that:

After determining the eigenvalues of A, we can then substitute each eigenvalue into Ax = λx to find the corresponding eigenvectors.
Examples
Find the eigenvectors of the following systems.
1. 
First, find the eigenvalues:
 |
 |
 |
|
 |
Then, find the determinant:
 |
 |
 |
|
 |
Thus, the characteristic polynomial is λ2 - 5λ + 6, and setting this equal to 0 and solving for λ yields the eigenvalues of A:
 |
|
 |
|

Then, to find the corresponding eigenvectors, substitute each eigenvector into Ax = λx, where  . When λ = 2:
. When λ = 2:
 |
 |
|
 |
Writing the above in the form of a system of equations yields:
 |
 |
 |
 |
The second equation is true for any real value of x2, so let x2 = s, where s is a non-zero real number. Substituting x2 into the first equation yields x1 = s, so

meaning that  or any multiple of is an eigenvector that corresponds to the eigenvalue of 2. For example, if
or any multiple of is an eigenvector that corresponds to the eigenvalue of 2. For example, if  , then
, then
 |
 |
 |
|
 |
|
 |
|
 |
When λ = 3:
|
 |
|
 |
Writing the above in the form of a system of equations yields:
|
 |
|
 |
In order to satisfy the second equation, x2 must equal 0. Substituting this into the first equation yields 3x1 = 3x1, which is true for any real value of x1. Let x1 = s, where s is a non-zero real number. Then:

Thus, the eigenvector corresponding to the eigenvalue of 3 is any multiple of  .
.
2. 
First, find the eigenvalues:
|
 |
 |
|
 |
Then, find the determinant:
|
 |
 |
|
 |
Thus, the characteristic polynomial is -λ3 + 7λ2 - 14λ + 8 and setting this equal to 0 and solving for λ yields the eigenvalues of A:
 |
|
 |
|
 |
|

Then, to find the corresponding eigenvectors, substitute each eigenvector into Ax = λx, where  . When λ = 1,
. When λ = 1,

Writing the above in the form of a system of equations,
 |
 |
 |
 |
 |
 |
For the third equation to be true, x3 must equal 0. Substituting this into the second equation,
 ,
,
so x2 must also be 0, and the first equation becomes:
 ,
,
which is true for all real values of x1. Let x1 = s, where s is a non-zero real number. Then:
 ,
,
Thus, the eigenvector corresponding to the eigenvalue of 1 is  .
.
For λ = 2:

In the form of a system of equations,
|
|
|
|
|
 |
For the third equation to be true, x3 must equal 0. Substituting this into the second equation yields 2x2 = 2x2, which is true for all real values of x2. Let x2 = s, where s is a non-zero real number. Substituting these values into the first equation yields:

Thus, x1 = 2s, so:

Thus, the eigenvector corresponding to the eigenvalue of 2 is  .
.
For λ = 4:

Writing the above in the form of a system of equations,
|
 |
|
 |
|
 |
The third equation is true for all real values of x3. Let x3 where s is a non-zero real number. Substituting this into the second equation yields,
 ,
,
and  .
.
Next, substitute x2 and x3 into the first equation to find x1:
 |
|
 |
 |
 |
 |
Thus, the eigenvector corresponding to an eigenvalue of 4 is  .
.